

佛山科学技术学院获2022年度广东省科技进步奖二等奖
近日,我校先进机器人技术与系统团队罗陆锋副教授、张云志博士、张清华博士参与完成的“工业视觉检测高适配性关键技术及应用”及王志峰博士参与完成的“机器人智能打磨抛光关键技术及装备研发与应用”两项成果荣获广东省科技进步奖二等奖。这次机器人团队同时斩获两项省科技奖,是机械工程学科团队建设取得的重要成果。
获奖成果“工业视觉检测高适配性关键技术及应用”以团队承担的广东省重点研发计划项目为依托,瞄准当前3C、新能源及半导体等行业生产过程中视觉检测精度稳定性、场景顺应性和算法通用性难以满足需求的问题,从工业光源、采样成像和视觉算法等三个方面展开核心攻关,突破了光学成像与视觉检测系统的高适配性关键技术,研发了高照度高均匀工业光源及其稳定控制技术、跨场景多尺度自适应采样与成像技术、易适配可迁移的视觉检测通用算法等三个科技创新成果。
工业视觉检测高适配性关键技术及应用
获奖成果“机器人智能打磨抛光关键技术及装备研发与应用”(我校参与的主要完成人:王志锋),该成果是我校联合广东工业大学、广东汇博机器人技术有限公司、箭牌家居集团股份有限公司等单位共同完成的,重点围绕机器人磨抛作业“轨迹规划失速、力位控制失准、工艺匹配失衡”三大共性技术难题,在国家863、省重点等项目资助下,历经十余年理论技术沉淀,深度融合工业机器人及新一代人工智能技术,以实现机器人磨抛规划高智能/装备高性能/运行高效率为总体目标,攻克了工件特征智能识别与机器人磨抛轨迹自动规划生成、磨抛过程力位柔顺精准控制及自补偿、磨抛工艺多参数协同管控及优化等关键技术,创建基于零件特征的机器人磨抛工艺自匹配优化与性能补偿理论技术体系,大大促进行业内机器人智能打磨抛光相关技术的发展。
基于零件特征的机器人磨抛工艺自匹配优化与性能补偿理论技术体系
此次获奖科技成果的顺利研发及成功落地,得益于我校机械工程学科长期坚持面向国家发展战略需求,深耕地方经济的发展需要,坚持与区域特色龙头企业开展了长期深入的产学研合作。例如,此次获奖牵头完成单位广东奥普特科技股份有限公司,与我校机械工程学科建立了长期的产学研合作关系,并于2023年4月与我校合作共建了广东省机器视觉创新中心。此前,先进机器人团队已与汇博机器人、箭牌卫浴联合研发的陶瓷卫浴智能产线荣获2019年广东省科技进步奖二等奖;与佛山铝型材制造企业共同研发的相关成果获得2021年广东省科技进步奖二等奖。团队已深度融入了区域制造业的数字化转型发展,形成了产学研高效融合的长效合作机制,相信此次获奖定会成为新里程的起点,我校机械工程学科一定会不断进取、勇攀科学高峰,为推动地方制造业高质量发展做出更大的贡献!
先进机器人技术与系统团队简介:
先进机器人技术与系统团队由我校副校长卢清华教授负责牵头组建,主要从事机器人与智能制造技术及系统研究,是机械工程学科五个主要研究方向之一。团队瞄准制造业数字化智能化转型升级对智能柔性化生产装备的迫切需求,围绕广东佛山泛家居、陶瓷、铝型材等特色产业发展需求,重点开展机器人与智能产线系统的感知、决策与控制研究,在机器视觉与机器人自动控制领域形成了特色。团队现有教师24人(正高5名、副高8名、讲师11名),教师全部具有博士学位,其中,省杰出青年基金获得者1名,兼职博士生导师3人、硕士生导师16人,具有海外经历的教师9人。
近年来,团队成员先后承担国家重点研发计划课题(2项)、国家自然科学基金面上/青年项目15项,广东省重点研发项目课题、粤佛联合基金重点项目及佛山重点领域科技攻关项目等25项;近五年,发表SCI/EI检索论文60余篇,授权发明专利50余项,相关成果获广东省科技进步奖二等奖6项、广东省教育教学成果一等奖1项、广东省机械工业科技奖一等奖1项、中国仪器仪表学科科技进步奖三等奖1项,并受到中国教育电视台《魅力中国》、《广东卫视》等栏目报道。团队与广东科达洁能股份有限公司、埃夫特智能装备股份有限公司、广东汇博机器人技术有限公司、佛山华数机器人有限公司、广东奥普特科技股份有限公司等机器人与智能制造领域龙头企业形成了紧密合作关系,成立了5个校企联合实验室,强化产学研协作攻关,深入开展产学研协同育人,团队研究生在“互联网+”、“挑战杯”等竞赛中获得斩获省赛特等奖、金奖等多项,获得广东省优秀研究生、国家奖学金等。

近日,佛山市南海区住房城乡建设和水利局发布《关于立即开展建筑施工领域安全防范大排查大整治工作的紧急通知》(以下简称“通知”)。
通知显示
即日起至12月底
南海区将开展房屋市政工程施工
安全隐患大排查大整治行动
确保房屋市政工程领域
安全生产形势稳定
检查内容
(一)建设单位首要责任落实情况。严格按照《广东省住房和城乡建设厅关于印发房屋市政工程建设单位落实质量安全首要责任管理规定(试行)的通知》要求,狠抓建设单位的工程质量安全首要责任,督促建设单位严格落实项目法人责任制,健全质量安全管理体系,保障项目质量安全投入。
(二)企业主体责任落实情况。检查建设、施工、监理、专业分包、劳务分包、租赁等单位主体责任落实情况,各方责任主体安全责任落实情况;重点检查其主要管理人员到岗履职、安全检查制度执行,是否压缩合理工期等情况。
(三)检查基坑安全管理情况。重点对深基坑进行检查,检查其专项方案编制、审核、专家论证情况;深基坑开挖的防护情况,包括周边防护栏杆、工人专用楼梯、同一垂直作业面上下层之间的隔离防护等;深基坑的合规性情况,包括支护、降(排)水、放坡、安全监测等内容。
(四)检查模板支撑体安全管理状况。重点检查高大支模系统,检查其专项方案编制、审核、专家论证情况;模板支撑系统搭设前材料及基础验收、安全技术交底、模板搭设、搭设后检查验收,安全监测、材料检测等情况。
(五)检查建筑起重机械设备安全管理状况。检查建筑起重机械产权备案(注销)、安装(拆卸)告知、安全档案建立、检验检测、安装验收、使用登记、定期检查保养等情况。
(六)检查施工现场消防安全管理情况。检查项目是否建立消防安全管理制度,是否对消防设施进行验收,在建建筑物是否设置符合要求的消防管道、消防栓、水带及水枪等,易燃易爆场所必须按要求配备灭火器,并安排专人定期检查;施工现场电气火灾隐患治理情况;工人宿舍、临时工棚用电情况等。
(七)检查高处作业安全管理情况。集中整治高处作业施工过程中存在的安全管理不到位、防护措施不完善、施工作业不规范等突出问题,重点检查施工现场是否设置安全警示标志或夜间警示标志,高处作业人员(包括架子工)持证上岗情况,落实高处作业安全防护措施,尤其是“三宝”(安全帽、安全带、安全网)、“四口”(楼梯口、电梯口、预留洞口、通道口)、“五临边”(沟坑槽和基坑周边、楼层周边、楼梯侧边、平台或阳台边、屋面周边)、脚手架搭设、模板搭设作业防护措施等情况。
(八)检查有限空间作业安全管理情况。重点检查“七个有没有”:
一是有没有全面辨识有限空间风险,并建档立册,在所有有限空间现场醒目位置设置安全警示标志;
二是有没有建立完善有限空间安全规章制度和作业流程,特别是强化作业前、作业中的通风和检测管控措施;
三是有没有为员工配备个人劳动保护用品,特别是配齐配全通风检测作业仪器、呼吸器等各类应急保障用品;
四是有没有落实有限空间作业中的安全监护措施,特别是按要求配备监护人员;
五是有没有确保有限空间作业现场设备设施安全,特别是电气设备符合防爆、安全等规定;
六是有没有严格落实有限空间作业许可申报审批管理;
七是有没有定期组织员工开展常态化有限空间作业安全培训,并且有计划地开展有限空间应急救援演练。
查隐患,补漏洞
南海坚定以务实有效措施
筑牢建筑施工领域安全屏障
请相关单位、人员
配合支持!
项目概况
汽车定点维修服务采购(罗村片区、官窑片区)招标项目的潜在投标人应在广东省政府采购网https://gdgpo.czt.gd.gov.cn/获取招标文件,并于 2023年12月11日 09时00分 (北京时间)前递交投标文件。
一、项目基本情况
项目编号:JF2023(NH)WZ0348
项目名称:汽车定点维修服务采购(罗村片区、官窑片区)
采购方式:公开招标
预算金额:2,520,000.00元
采购需求:
二、申请人的资格要求:
1.投标供应商应具备《中华人民共和国政府采购法》第二十二条规定的条件,提供下列材料:
1)具有独立承担民事责任的能力:在中华人民共和国境内注册的法人或其他组织或自然人, 投标(响应)时提交有效的营业执照(或事业法人登记证或身份证等相关证明) 副本复印件。分支机构投标的,须提供总公司和分公司营业执照副本复印件,总公司出具给分支机构的授权书。
2)有依法缴纳税收和社会保障资金的良好记录:提供投标截止日前6个月内任意1个月依法缴纳税收和社会保障资金的相关材料扫描上传。如依法免税或不需要缴纳社会保障资金的,提供相应证明材料扫描上传,或提供《政府采购供应商资格信用承诺函》(详见附件1)。
3)具有良好的商业信誉和健全的财务会计制度:供应商提供加盖供应商公章的《政府采购供应商资格信用承诺函》(详见附件1)或提供下列任一项证明材料:①2021年度或2022年度经审计的财务报告及财务报表扫描件(如供度财务报表扫描件)(要求:审计报告由第三方会计师事务所或其它合法审计机构出具,须包含会计师事务所或审计机构的盖章页)②基本开户银行出具2023年度任意1个月的资信证明,如资信证明不能体现基本开户账户的,应另附开户许可证。无开户许可证的,可提供由银行开具的《基本存款账户信息》(公户账户主档)或其他相关证明资料,以上文件均需加盖银行印章。
4)履行合同所必需的设备和专业技术能力:按投标(响应)文件格式填报设备及专业技术能力情况。
5)参加采购活动前3年内,在经营活动中没有重大违法记录:参照投标(报价)函相关承诺格式内容。 重大违法记录,是指供应商因违法经营受到刑事处罚或者责令停产停业、吊销许可证或者执照、较大数额罚款等行政处罚。(根据财库〔2022〕3号文,“较大数额罚款”认定为200万元以上的罚款,法律、行政法规以及国务院有关部门明确规定相关领域“较大数额罚款”标准高于200万元的,从其规定)
2.落实政府采购政策需满足的资格要求:
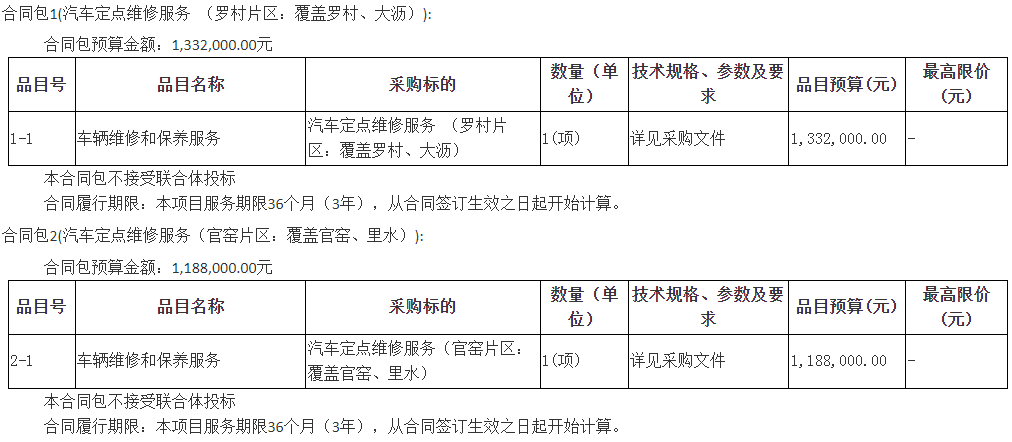
合同包1(汽车定点维修服务 (罗村片区:覆盖罗村、大沥))落实政府采购政策需满足的资格要求如下:
本项目专门面向中小企业采购的项目。《政府采购促进中小企业发展管理办法》(财库〔2020〕46号)、《关于政府采购支持监狱企业发展有关问题的通知》(财库〔2014〕68号)、《关于促进残疾人就业政府采购政策的通知》(财库〔2017〕141号)、《关于环境标志产品政府采购实施的意见》(财库〔2006〕90号)、《节能产品政府采购实施意见》的通知(财库〔2004〕185号)、《财政部发展改革委生态环境部市场监管总局关于调整优化节能产品、环境标志产品政府采购执行机制的通知》(财库〔2019〕9号)。
合同包2(汽车定点维修服务(官窑片区:覆盖官窑、里水))落实政府采购政策需满足的资格要求如下:
本项目专门面向中小企业采购的项目。《政府采购促进中小企业发展管理办法》(财库〔2020〕46号)、《关于政府采购支持监狱企业发展有关问题的通知》(财库〔2014〕68号)、《关于促进残疾人就业政府采购政策的通知》(财库〔2017〕141号)、《关于环境标志产品政府采购实施的意见》(财库〔2006〕90号)、《节能产品政府采购实施意见》的通知(财库〔2004〕185号)、《财政部发展改革委生态环境部市场监管总局关于调整优化节能产品、环境标志产品政府采购执行机制的通知》(财库〔2019〕9号)。
3.本项目的特定资格要求:
合同包1(汽车定点维修服务 (罗村片区:覆盖罗村、大沥))特定资格要求如下:
(1)供应商未被列入“信用中国”网站(www.creditchina.gov.cn)“记录失信被执行人或重大税收违法案件当事人名单或政府采购严重违法失信行为”记录名单;不处于中国政府采购网(www.ccgp.gov.cn)“政府采购严重违法失信行为信息记录”中的禁止参加政府采购活动期间。(以资格审查人员于投标(响应)截止时间当天在“信用中国”网站(www.creditchina.gov.cn)及中国政府采购网(http://www.ccgp.gov.cn/)查询结果为准,如相关失信记录已失效,供应商需提供相关证明资料)。
(2)单位负责人为同一人或者存在直接控股、 管理关系的不同供应商,不得同时参加本采购项目(或采购包) 投标(响应)。 为本项目提供整体设计、 规范编制或者项目管理、 监理、 检测等服务的供应商, 不得再参与本项目投标(响应)。 投标(报价) 函相关承诺要求内容。
(3)供应商须具有有效期的《道路运输经营许可证》或提供交通管理部门备案资料,具有汽车维修服务二类或以上资质。
合同包2(汽车定点维修服务(官窑片区:覆盖官窑、里水))特定资格要求如下:
(1)供应商未被列入“信用中国”网站(www.creditchina.gov.cn)“记录失信被执行人或重大税收违法案件当事人名单或政府采购严重违法失信行为”记录名单;不处于中国政府采购网(www.ccgp.gov.cn)“政府采购严重违法失信行为信息记录”中的禁止参加政府采购活动期间。(以资格审查人员于投标(响应)截止时间当天在“信用中国”网站(www.creditchina.gov.cn)及中国政府采购网(http://www.ccgp.gov.cn/)查询结果为准,如相关失信记录已失效,供应商需提供相关证明资料)。
(2)单位负责人为同一人或者存在直接控股、 管理关系的不同供应商,不得同时参加本采购项目(或采购包) 投标(响应)。 为本项目提供整体设计、 规范编制或者项目管理、 监理、 检测等服务的供应商, 不得再参与本项目投标(响应)。 投标(报价) 函相关承诺要求内容。
(3)供应商须具有有效期的《道路运输经营许可证》或提供交通管理部门备案资料,具有汽车维修服务二类或以上资质。
三、获取招标文件
时间: 2023年11月20日 至 2023年11月27日 ,每天上午 00:00:00 至 12:00:00 ,下午 12:00:00 至 23:59:59 (北京时间,法定节假日除外)
地点:广东省政府采购网https://gdgpo.czt.gd.gov.cn/
方式:在线获取
售价: 免费获取
四、提交投标文件截止时间、开标时间和地点
2023年12月11日 09时00分00秒 (北京时间)
递交文件地点:广东省政府采购网(https://gdgpo.czt.gd.gov.cn/)
开标地点:广东省政府采购网(https://gdgpo.czt.gd.gov.cn/)
五、公告期限
自本公告发布之日起5个工作日。
六、其他补充事宜
1.本项目采用电子系统进行招投标,请在投标前详细阅读供应商操作手册,手册获取网址:https://gdgpo.czt.gd.gov.cn/help/transaction/download.html。投标供应商在使用过程中遇到涉及系统使用的问题,可通过020-88696588 进行咨询或通过广东政府采购智慧云平台运维服务说明中提供的其他服务方式获取帮助。
2.供应商参加本项目投标,需要提前办理CA和电子签章,办理方式和注意事项详见供应商操作手册与CA办理指南,指南获取地址:https://gdgpo.czt.gd.gov.cn/help/problem/。
3.如需缴纳保证金,供应商可通过'广东政府采购智慧云平台金融服务中心'(http://gdgpo.czt.gd.gov.cn/zcdservice/zcd/guangdong/),申请办理投标(响应)担保函、保险(保证)保函。
4.云平台操作过程中如有相关问题可通过广东省政府采购网(http://gdgpc.czt.gd.gov.cn )下载操作手册查询,或通过云平台公布的在线客服、微信/QQ群、专线电话等方式咨询。
5.本项目采用远程电子开标,参与本项目的投标人可登录云平台通过“开标大厅”进行开标签到及投标文件解密,签到需在开标时间前30分钟内完成。各投标人在参加开启以前须自行对使用电脑的网络环境、驱动安装、客户端安装以及数字证书的有效性等进行检测,确保可以正常使用。投标人须在投标文件提交截止时间前,将电子投标文件成功完整上传到云平台项目采购系统,且取得响应回执。
七、对本次招标提出询问,请按以下方式联系。
1.采购人信息
名 称:佛山市南海区公路管理站
地 址:佛山市南海区狮山镇兴业东路8号
联系方式:0757-86286685
2.采购代理机构信息
名 称:广东智鸿工程咨询有限公司
地 址:广东省佛山市禅城区季华一路智慧新城T1栋0603室
联系方式:0757-82131230
3.项目联系方式
项目联系人:广东智鸿工程咨询有限公司
电 话:0757-82131230

微信
新浪微博
QQ空间
QQ好友
豆瓣
Facebook
Twitter

佛山南海开展安全隐患大排查大整治!
12月1日起禁止使用“生鲜灯
佛山禅城在2023年度全国综合实力百强区排名第16名
佛山禅城行政执法如何高标准推进?禅城召开会议部署
佛山禅城多举措加强协作,助黎平大学生走出大山
佛山市加强地市交流协作 推动垃圾分类提质增效
佛山禅城区委常委会召开会议:以头号工程之势深入推进“百千万工程”
广东省农业产业化龙头企业发展大会在南海举行
佛山顺德通过“中国优质淡水鱼之乡”专家组评审
佛山三水引进大项目建设大平台,打造湾区医械产业新高地
佛山市公安局南海分局平洲派出所采购PDT警用对讲机招标公告
佛山市顺德区容桂街道容光路以南 、新有路以东地块网上租赁竞投公告交易公告
佛山市公安局南海分局桂城派出所采购PDT警用对讲机招标公告
佛山市三水区大塘镇永丰村委会“王字号塘”(土名)地块三出让公告
佛山市第一人民医院健康管理医学科体检报告打印外包服务项目招标公告
佛山高速户外广告牌投资建设项目一期工程采购公告
佛山高明区杨和镇禄堂村村居改造工程(第三次)中标结果公示
佛山市顺德区北滘镇西南片区市政道路横五路道路工程一期招标公告
高明荷城街道2023年松材线虫病防治工程项目(疫木除治、日常监测)竞争性磋商公告
佛山市强制隔离戒毒所戒毒人员生活费项目招标公告
佛山市信力建设有限公司造价计量员招聘公告
警惕!童工红线不能碰!!!
高明荷城街道富湾社区卫生服务中心招聘!
佛山市第一中学第二轮公开招聘2024年高中教师的公告
佛山市三水白霓文旅教育发展有限公司副总经理招聘公告
有编制!禅城区教育系统招聘公办中小学事业编制教师36名!
佛山市荣山中学招聘初高中政治教师
南海区狮山镇大榄小学招聘临聘数学代课教师
佛山市禅城区南庄镇公有资产管理办公室公有物业竞租(2023年第12期)竞租公告
佛山市祖庙资产投资管理有限公司 2023- 第 2 期招租信息
南海大沥镇黄海路怡海花园十八至二十一座11号铺(第二次)网上租赁竞投公告
南海大沥镇黄海路怡海花园十八至二十一座12号铺(第二次)网上租赁竞投公告
南海大沥镇黄海路怡海花园十八至二十一座16号铺(第二次)网上租赁竞投公告
佛山市禅城区南庄镇公有资产管理办公室公有物业竞租(2023年第11期)竞租公告
佛山大道南3号人行天桥(顺联家具南区旁)广告位出租竞价公告
顺德乐从创智谷“智汇广场”物业招租信息
佛山大道南3号人行天桥(顺联家具南区旁)广告位出租竞价公告
节后想清清肠道?来杯炒米茶,健脾和胃、祛痰燥湿……
佛山高明万人濑粉节即将开幕!9.9元食正宗濑粉!
佛山禅城区99套共有产权房开放申购
佛山市禅城区房地产开发项目办理商品房首次登记时间的公告
佛山禅城最大住宅小区改造动工!国企参与!打造15分钟便民生活圈!
佛山南海最新普通住房标准出炉!下调1345元/㎡!
2023佛山金秋房博会人气旺,市民一站式看房好评连连
佛山市房东、租客必看!自建房消防安全一定要注意!
佛山三水打造一站式购房综合服务平台“淼惠购”!100套特价房上线!
明天起,首套房贷利率无需申请,自动下调!
佛山禅城又一人才公寓投入使用
佛科院仙溪校区教职工公寓提前竣工交房!
CCLE第六届中国教育后勤展览会
第134届广交会即将开幕:佛企全力备战,抢滩海外市场
第二十四届佛山茶业博览会
2024深圳国际碳化硅及相关材料设备展览会
全球家具 顺德时代!龙江家具两展盛大开幕!
前进汇展中心!全球家具 顺德时代!
米兰汇家居展贸中心!全球家具 顺德时代!
第44届国际龙家具展览会世博汇分场!全球家具 顺德时代!
第34届亚洲国际家具材料博览会!全球家具 顺德时代!
玛奥汇展中心!全球家具 顺德时代!第44届国际龙家具展览会!
海关16条措施促加工贸易高质量发展
广州增城区新塘镇塘美村第八股份经济合作社的松山铺位出租电子竞投交易公告
天河区首个大宗商品供应链合作平台正式成立
佛山高明区民营企业家走进人工智能先进企业取经
顺企奔朗新材启动提质增效改造项目!总投资3亿元!
广东创世纪保险代理有限公司举行上市启动仪式
佛山禅城区2023年第三季度小微企业社保补贴名单公示
佛山市7个主体入选广东省第一批碳达峰碳中和试点
佛山顺德第41家上市企业诞生
山西华翔集团华南生产基地落户佛山顺德
德冠新材正式挂牌上市!佛山第80家企业上市!
佛山市建发(三水)广发建德新产业基金设立!首期规模5亿元,助力战新产业落户三水
镁合金深加工产业佛山迎来黄金发展机遇
佛山住房公积金提取有新变化→
佛山住房公积金新政8月起实施
在外市缴存公积金,这样也能申请贷款!
租房提取公积金有变化!7月1日起,最高可提取超6万元!
佛山公积金贷款上限拟提至50万/人,夫妻最高可贷100万
7月起多孩家庭住房公积金额度更高!提取额度上调好消息!
佛山职工租房提取额度上调!下月起公积金有新变化
住房公积金最新相关问题解答
公积金提取额度上调,可按月提!多孩家庭额度更高!
佛山公积金:买自建房、公寓能申请公积金贷款吗?
2024年度佛山居民医保申报开始啦!
佛山2024年居民医保启动参保
佛山社保:“生育异地备案”等3项社保主题集成服务上线了
佛山社保:如何享受门特病种待遇?申办指南→
南海区2024年度居民基本医疗保险接受申报
三水区2023年10月第三批就业困难人员的初审公示
禅城社保“智能语音客服”智能化服务长者
佛山社保:男职工的生育保险可以这样用!
佛山社保:普通门诊的年度报销限额是多少?跨区怎么报销?
佛山社保:试用期工伤了,能享受工伤保险待遇吗?
2023年第三季度南海区各镇(街道)新市民积分入户分数及名单公示
佛山三水7月新入户人数迎爆发式增长
佛山稳定居住就业入户办事指引
居住证没续签?影响积分入户入学!
佛山拟出台落户新政!
佛山禅城区2023年第二季度新市民积分入户分数公示
佛山市入户方式汇总!市内市外都有!
佛山顺德区2023年第二季度获积分入户资格新市民名单公示
佛山南海区2023年第二季度各镇(街道)新市民积分入户分数及名单公示
佛山三水区2023年第二季度新市民积分入户排名及入户资格的公示
禅城石湾又一所公办幼儿园开园!佛山市禅城区陶都幼儿园!
全国急救教育试点学校!佛山入选学校+2!
佛科院3学科上榜!“2023软科中国最好学科排名”全国前50%
顺德伦宝幼儿园2024年春季招生开始啦
中小学生舞蹈等体育艺术类校外培训安全提醒发布
佛山市初中学生综合素质评价信息管理平台正式上线!
华南师范大学附属乐从小学预计明年9月投用
高明区这所学校正式升格为高明技师学院
教育部:中小学校要确保学生课间正常活动
户籍生入学!佛山正在征求意见,将有这些变化→
佛山华光诞重磅回归!专属于广东人的“说唱”约定你!
顺德加州鲈、顺德草香猪纳入全国名特优新农产品名录
传统鸡仔饼——古法还原童年回忆
禅城张槎豆沙角:手工磨馅,独特味道
乡下菜干煲——绿色农家风味
两天一夜吃喝玩乐玩转香港,保姆级旅游攻略
佛山使秋色巡游到南海!最佳打卡点→
佛山粤剧院新址落成!来「游园今梦」市集玩穿越!
慈悲情怀自在人间,一脉相承的观音文化铸就西樵山南海观音节品牌新名片
佛山中秋国庆假期,人气财气双丰收!
南海假期有多火,数据会说话!
2023年中秋节、国庆节假期国内旅游出游8.26亿人次
南海九江成文旅新“顶流”!小镇也有出圈大能量!
国庆八方来客游佛山,感受城市文明旅游浓厚氛围
三水区酒店行业招商推介会召开
三水大塘文旅配套再添新载体,麗枫酒店正式开业
南海西樵山酒店群改造方案出炉!
三水白坭将新增一家主题酒店!预计九月下旬对外营业!
西樵山白天鹅君锦酒店!南海西樵地标酒店焕新!
佛山皇冠假日酒店玩出岭南新国潮
跟随四季,探寻千面泰式风情
居停四季 漫享商务休闲之旅 四季酒店集团奉上多样化商务休闲旅行服务体验
顺联温德姆酒店 | 夏日新启,美好时光
禅城区王府井紫薇港:积极求变应变,带来超高人气!
这些药品不合格,召回、停售!
顺德北滘各社区卫生服务站开设超声门诊 市民家门口可接受专业诊疗
禅城区人民医院总院地下室架构封顶,主体结构已进至三层
三水区举办妇幼健康竞赛,聚焦妇产儿急危重症救治比拼四大项目
三水西海社区卫生服务站设夜间门诊 方便群众就医
【三水中医】露从今夜白,白露养生“润”为先
顺德伦教医院预约就医攻略!手机一键挂号
【三水中医】加强医联体合作 走访交流促提升
【三水中医】反胃、烧心、慢性咳嗽?医生带您正确认识胃食管反流病
三水区九月家庭医生巡诊安排来啦!
高明明城旧沧江桥将封闭维修加固,请注意绕行!
佛山顺德新增一批电子警察
顺德全区大规模整治,持续到年底!
南海区人民医院公交枢纽启用
佛山有轨电车里水示范段工程再次提速
中山东部外环高速项目有新进展
佛山购车补贴来袭!最高补贴5000元/辆!
广湛高铁,有最新进展!
佛山这些路段本周末将有交通管制!
南海新市民,这些居住证业务在支付宝上都能办啦!
三水区新市民,区、镇、村均可办居住证!
佛山市“员工录用”一件事上线
佛山车管业务最全收费标准出炉
佛山南海营业执照上门办 服务群众“零距离”
佛山顺德区非学科类校外培训机构审批流程来了
佛山公安窗口日均受理出境申请1.35万宗!这个暑假,让佛山市民安心办好证!
高明区行政服务中心致力提升服务便利度,持续优化政务营商环境
禅城祖庙街道行政服务中心推出“上门办”便民服务
驾驶证迎来“终身免检”?只要满足这两个条件!
庄子素解 第二章 徐无鬼
庄子素解 第一章 庚桑楚
庄子素解 第十五章 知北游
庄子素解 第十四章 田子方
庄子素解 第十三章 山木
庄子素解 第十二章 达生
[东方哲学] 一处不立 处处能立
获取深度世界真相信息的两种途径
物理学遇到意识素解(7)
海外需求萎靡背后:美国进口全面收缩、欧盟现结构性变化
欧洲议会已批准通过《新电池法》,新能源卖家将面临更加严格的考验
美国亚马逊的销售税和免税的州有哪些?
Amazon 店铺代运营案例:家居类目
Amazon 店铺代运营案例:户外类目
Amazon 店铺代运营案例:家居类目
Amazon 店铺代运营案例:饰品类目
Amazon 店铺代运营案例:宠物类目
Amazon运营团队老师介绍:simon
Amazon运营团队老师介绍:Fanny
为什么家居不宜挂太多红色装饰物?
如何将一间旧厂房催旺吉运?
装修前规划风水,好处多多
三角形的办公室如何化解?
工厂机器为什么不能放在车间中心点
为什么家居阳台不宜放招阴绿植?
小孩晋考如何风水助力?
为什么老总办公室不能摆2张办公桌?
有才有趣有实力 祥菱Q川渝区域上市推广会圆满举行
佛山市超4000辆车辆处理公告!
有才有趣有实力 全球微卡新势力祥菱Q领潮上市
美孚1号车养护“2023动力系统养护专家挑战赛”在沪圆满收官 体系实力赋能人才培养,消费者导向助推服务升级
有才有趣有实力 全球微卡新势力福田祥菱Q全球首发
成都车展首发,星途星纪元ET超舒适家居美学内饰,从新定义轻奢豪华
以AI大模型为切入点,智能汽车下半场星途星纪元胜算有多大?
这些汽车将被紧急召回!
这些车辆被紧急召回!看看你家有没有→
品质铸就百分价值 宇通轻卡T系列迎“大运”登陆成都
佛山国家高新技术产业开发区
佛山意美家卫浴陶瓷世界
澳大利亚技术移民移民
加拿大BC省雇主担保移民
美国eb3雇主担保移民
马来西亚永久居留(红卡)
佛山消委会:网络直播套路深,翡翠消费需谨慎!
机器视觉人才供应链第一梯队:清远市万金目视科技有限公司
跨境电商脱口秀:炮哥刘智勇
建材家居短视频直播达人——陈宣平
广东金麦福餐饮管理服务有限公司